결과 >>
코드 >>
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
|
#include "opencv2/opencv.hpp"
#include <iostream>
#include <vector>
using namespace cv;
int homographyStudy()
{
// 이미지 읽기
Mat src1 = imread("graf1.png", IMREAD_COLOR);
Mat src2 = imread("graf3.png", IMREAD_COLOR);
if (src1.empty() || src2.empty())
{
//std::cout << src1.empty() << std::endl;
//std::cout << src2.empty() << std::endl;
std::cerr << "Image load failed!" << std::endl;
}
// feature 객체 생성
Ptr<Feature2D> feature = KAZE::create();
// keypoints 벡터
std::vector<KeyPoint> keypoints1, keypoints2;
// descriptor 행렬
Mat desc1, desc2;
feature->detectAndCompute(src1, Mat(), keypoints1, desc1);
feature->detectAndCompute(src2, Mat(), keypoints2, desc2);
// 특징점 매칭
Ptr<DescriptorMatcher> matcher = BFMatcher::create();
std::vector<DMatch> matches;
matcher->match(desc1, desc2, matches);
// Good 매칭 선택(둘 간의 거리가 작다면 OK)
std::sort(matches.begin(), matches.end());
std::vector<DMatch> good_matches(matches.begin(), matches.begin() + 50);
std::cout << "number of keypoints1 : " << keypoints1.size() << std::endl;
std::cout << "number of keypoints2 : " << keypoints2.size() << std::endl;
std::cout << "number of good matches : " << good_matches.size() << std::endl;
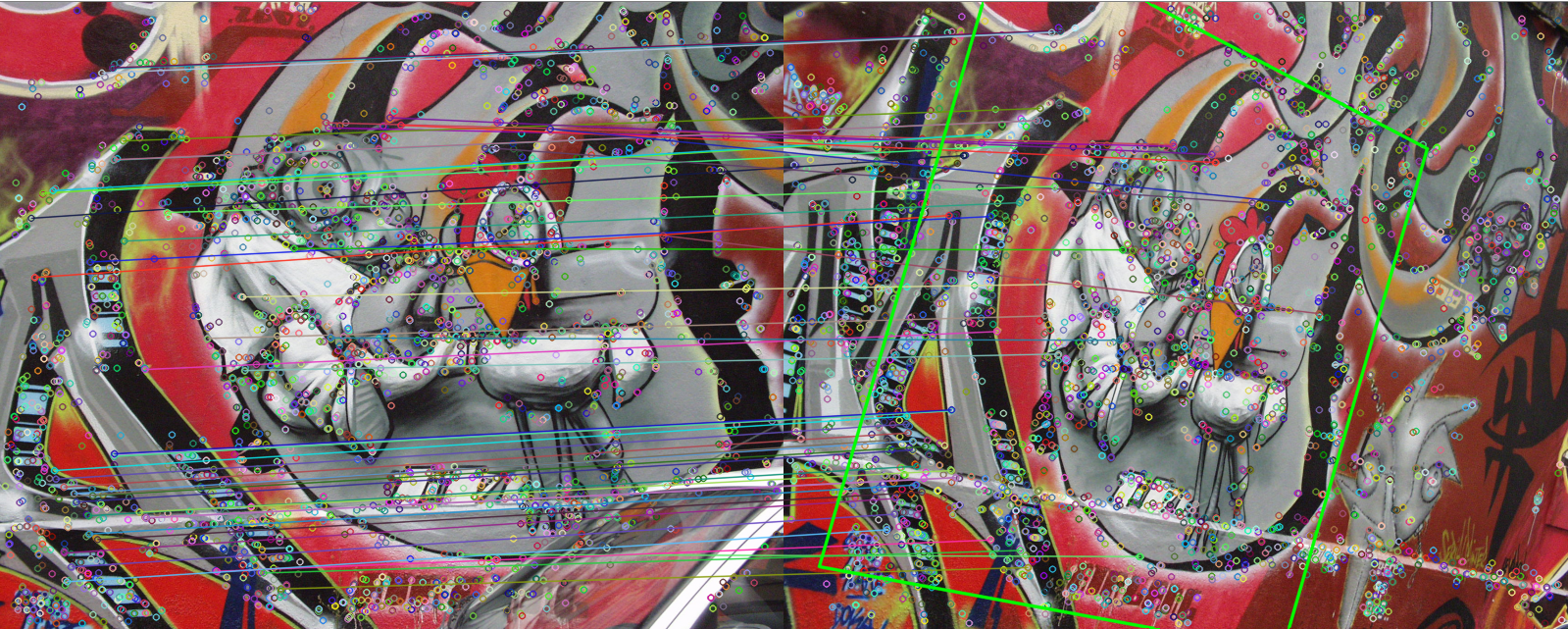
// 매칭 결과를 dst에 그린다
Mat dst;
drawMatches(src1, keypoints1, src2, keypoints2, good_matches, dst,
Scalar::all(-1), Scalar::all(-1), std::vector< char >());
// 호모그래피를 구하기 위해 쿼리 특징점, 받는 특징점을 pts1, pts2에 옮긴다.
std::vector<Point2f> pts1, pts2;
for (size_t i = 0; i < good_matches.size(); i++)
{
pts1.push_back(keypoints1[good_matches[i].queryIdx].pt);
pts2.push_back(keypoints2[good_matches[i].trainIdx].pt);
}
// 호모그래피 변환 행렬
Mat H = findHomography(pts1, pts2, RANSAC);
std::vector<Point2f> corners1, corners2;
corners1.emplace_back(Point2f(0, 0));
corners1.emplace_back(Point2f(src1.cols - 1.f, 0));
corners1.emplace_back(Point2f(src1.cols - 1.f, src1.rows - 1.f));
corners1.emplace_back(Point2f(0, src1.rows - 1.f));
perspectiveTransform(corners1, corners2, H);
// 호모그래피로 변환된 코너를 오른쪽 그림에 옮긴다.
std::vector<Point> corners_dst;
for (Point2f pt : corners2) {
corners_dst.emplace_back(Point(cvRound(pt.x + src1.cols), cvRound(pt.y)));
}
// 호모그래피로 변환된 부분에 사각형을 그린다.
polylines(dst, corners_dst, true, Scalar(0, 255, 0), 2, LINE_AA);
// imshow
imshow("src1", src1);
imshow("src2", src2);
imshow("dst", dst);
waitKey();
destroyAllWindows();
return 0;
}
|
'C' 카테고리의 다른 글
| c++ sobel operator 구현 코드 (0) | 2021.10.28 |
|---|---|
| 영상처리 C++ 코드 - HOG+SVM을 활용한 보행자 검출 (0) | 2021.08.12 |
| c++ leetcode coin change code (0) | 2021.07.27 |
| leetcode minimum path sum c++ code (0) | 2021.07.27 |
| c++ leetcode DP min cost climing stairs code (0) | 2021.07.26 |
